1977年美國新研製的A-10攻擊機在巴黎航展上墜毀,飛行員為了展示A-10良好的低空機動性能,在高度600米做垂直向下的半滾倒轉機動,由於飛行員操縱失誤,飛機沒有按最佳軌跡退出俯衝,而是直接摔在了跑道上。2012年8月份,俄羅斯和白俄羅斯的蘇-27飛機,又相繼在莫斯科航展和波蘭航展上發生超低空飛行表演事故。人們不禁要問,超低空飛行為什麼禍事頻發,超低空飛行的意義何在,超低空飛行有怎樣與眾不同的奧秘?

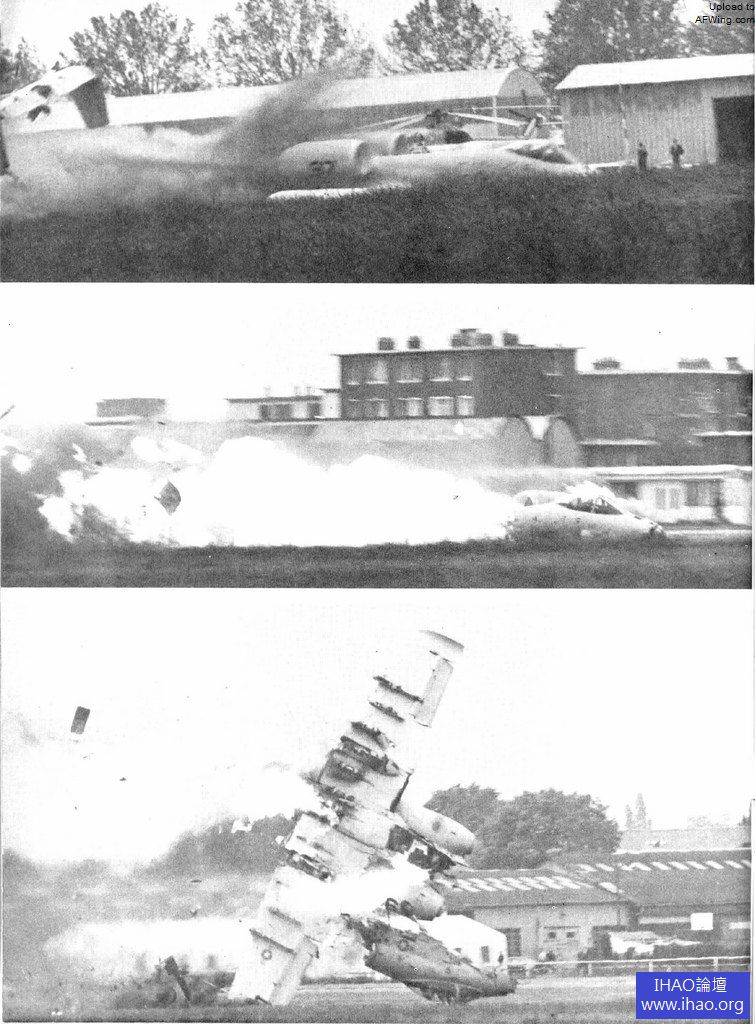
1977年A-10在巴黎航展上的慘烈墜機
一、超低空之“禍”
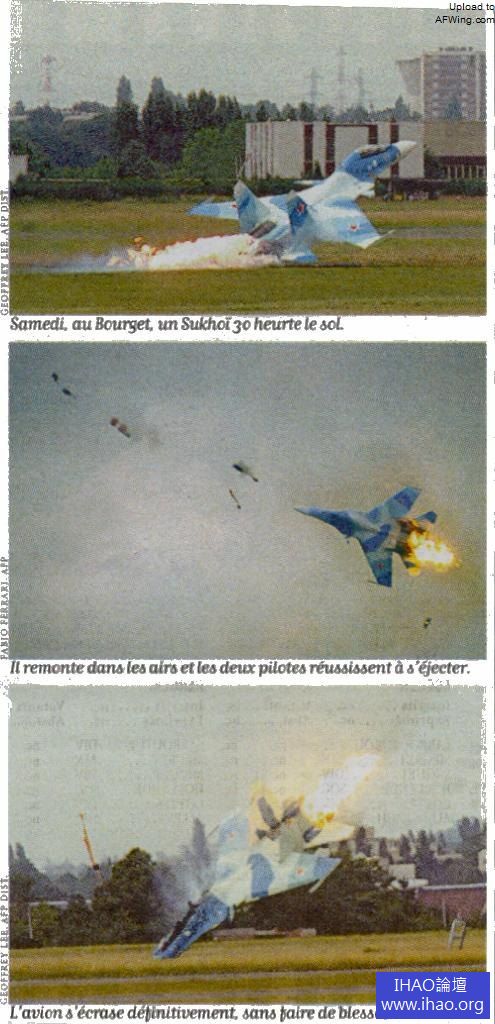
超低空飛行並不是為表演而設計的,對於超低空戰術和技術運用最多的還是在實戰中。然而,我們很少聽到在超低空實戰攻擊中發生墜機的案例,反而在各類飛行表演中,關於超低空事故的消息不絕於耳,其中蘇-27家族可謂”名聲顯赫”,而最著名也是最慘烈的事故發生在2002年的烏克蘭。
2002年7月27日,烏克蘭西部城市利沃夫在這天有兩件喜事,一是迎來趕走德國法西斯的城市解放日,二是迎來空軍第14軍成立60週年紀念日。時值盛夏,利沃夫天空晴朗驕陽似火,郊外斯克尼洛夫機場,一萬多名觀眾前來觀看紀念日慶典的飛行表演。當地時間12點45分,最後一個露面的蘇—27戰鬥機騰空而起,然而,等待觀眾的不是一場眩目的飛行表演,而是一幕驚心動魄的慘劇。據俄羅斯格羅莫夫試飛院的著名試飛員科沃丘爾事後分析,蘇-27飛機是在做一個高難度的“越肩滾轉”時,飛行員錯誤地減小了發動機推力,在退出俯衝時由於動力不足機動能力下降,無法在預定高度退出俯衝導致飛機觸地墜毀。從視頻回放中我們可以看出,觸地時蘇-27飛機已經快要拉起來了,飛機帶著坡度幾乎是貼著地皮觸地的,沒有明顯的撞擊現象,飛機迅速起火併解體,飛散的殘骸碎片飛入觀眾人群,釀成了死亡83人的巨大慘劇,而兩名飛行員在飛機即將墜毀的瞬間跳傘離機得以倖免遇難。這是人類航空史上最嚴重的飛行表演事故。



烏克蘭利沃夫航展災難
對此次烏克蘭飛行表演事故感興趣,並不是因為事故的慘烈程度,而是因為這是一起典型的超低空飛行事故案例,仔細分析事故有助於我們了解超低空飛行的特點,以及發生超低空飛行事故的一般規律。
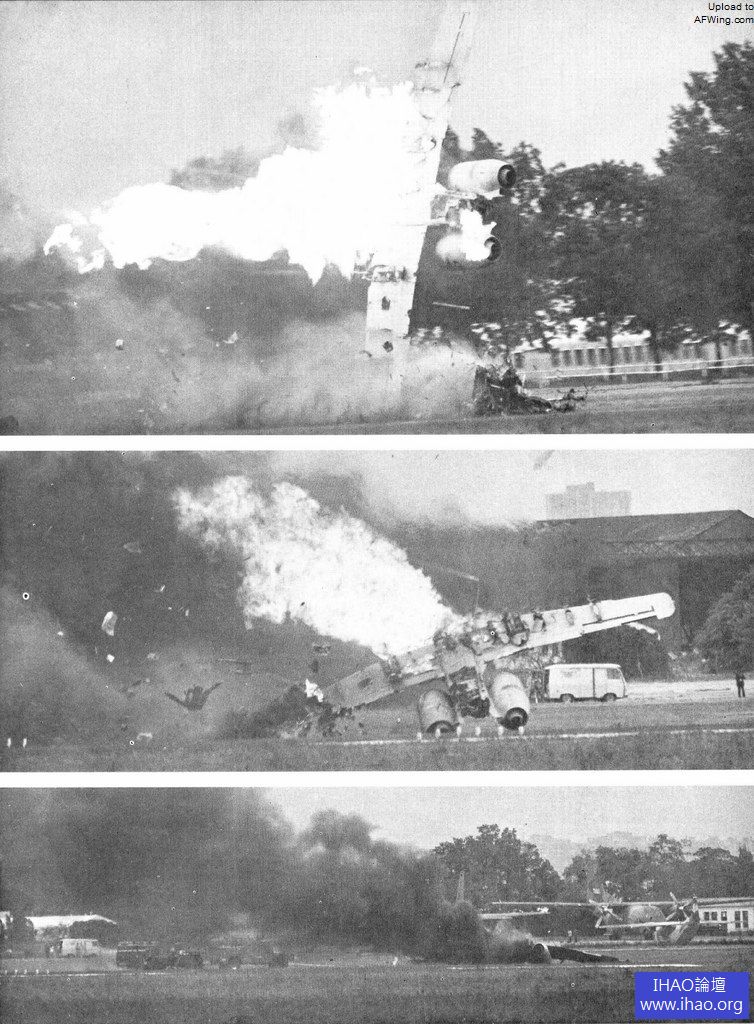
以前曾經在文章中介紹過,飛行表演大致分為機場區域表演和公開區域表演兩種。飛行表演作為一種航空技術與表演藝術結合的產物,所要展示的是飛機的性能和飛行員高超的駕駛技術。而作為機場區域的特技飛行表演,超低空的驚險機動是必不可少的,因為只有超低空表演才能夠在觀眾視線範圍內盡可能地展示飛機的風采。高水平的飛行員不會僅做水平和垂直機動,表演中他們大都會做複合機動,而所謂的“越肩滾轉”就是典型的複合機動動作。“越肩滾轉”其實是大坡度斜筋斗+倒扣俯衝半滾+大坡度俯衝退出的組合機動,其特點是垂直與水平結合的機動加滾轉機動,再加俯衝躍昇機動。從視覺上看既有垂直機動的小半徑特點,又有水平機動的區域變化,還有滾轉機動的變幻莫測,加之幾個動作銜接流暢,給觀賞者帶來驚險刺激的視覺效果。“越肩滾轉”的難度並不在於其機動的複雜程度,而在於大坡度垂直機動中高度控制精度難以把握,尤其是在動作銜接和滾轉時機上控制不好,退出俯衝時容易造成損失高度過多,嚴重時就會導致飛行事故。機動飛行中的發動機狀態也不可忽視,“機動能量”控制尤為關鍵,推力過大速度增加太快,會造成機動半徑的增加,而推力過小也會造成飛機“機動能量”不足,從而增加飛機退出俯衝的高度損失。1999年6月12日,巴黎航展上的俄羅斯蘇-30MKI的表演事故,也是在做一個類似的複合機動中,在退出大坡度俯衝機腹觸地的,所不同的是由於蘇-30飛機的鴨翼具有主動控制功能,可以使飛機在機腹觸地的情況下再次拉起,為飛行員贏得了最後的跳傘逃逸機會。
蘇-30MKI在巴黎航展上擦尾墜毀
二、超低空飛行“禍”從何起?
將超低空飛行事故解釋為高度不足顯然過於簡單。從技術上分析造成高度損失過多的原因大致分為四類:一是軌跡控制不當導致飛機直接觸地,二是由於滾轉機動操縱不當導致軌跡突變觸地,三是操縱超出限制致使飛機失速或變態觸地,四是飛行員短時間“空間定向空白”,丟失狀態導致飛機觸地。
在垂直向下機動中,高度損失或者說是機動半徑受多種因素影響,其中最重要的是過載和速度,而影響飛行過載和速度的因素又錯綜複雜。一個有經驗的飛行員可以在垂直機動中獲得比一般飛行員小200米以上的機動半徑。這就是為什麼王牌飛行員可以在1000甚至800米高度上向下做垂直機動,而有些飛行員在高度1200米做同樣動作卻可能發生事故。通常最佳的垂直向下機動速度大致與有利速度相當,例如三代機的最佳垂直向下機動速度大致在500-700km/h之間。
滾轉機動中突然的高度損失大都是由於飛行員過載控制失當造成的。當飛機的坡度滾轉到超過90度後,正過載不僅不能使飛機上升高度,反而會導致更多的高度損失。在飛行事故調查的飛參記錄中,往往會看見過滾轉中飛機載超過2g的現象。需要指出的是滾轉中的拉桿操縱造成了過載增加,但有時飛行員的拉桿完全是下意識的。一方面操縱習慣上飛行員在滾轉中往往推桿不足,為了減小滾轉機動中的高度損失,一般的做法是進入滾轉之前先使飛機形成5~10度的小角度上升;另一方面,滾轉中下意識的拉桿還與飛行員的心理有關,在超低空飛行中大地景物對飛行員形成強烈的刺激,飛行員會下意識地拉桿使飛機上升,這種下意識的拉桿在倒飛中是致命的,因為拉桿非但不能使飛機上升,反而會使飛機迅速下墜從而損失更多的高度。
垂直向下機動中的失速變態原因大多是飛行員急於退出俯衝粗猛拉桿造成的,但導致失速變態的起因卻在此之前,由於操縱不當已經形成高度過低的趨勢,為了盡快退出俯衝飛行員急劇拉桿忽視了飛機的限制迎角和過載。最嚴重的甚至出現飛機過載超限致使機翼變形彎曲的情況。多數飛行員對機動飛行中的迎角超限的概念是理解的,但是在認知領域存在一個模糊區,當速度遠遠大於最小機動表速時,飛行員對於迎角超限往往不敏感。我就曾在殲-6飛機極曲線試飛中遇到過一次險情,當我在10000m高度做表速500km/h的收斂轉彎時,看著過載表以為一切正常,可是當過載達到4g時飛機突然出現變態,急劇的狀態變化使飛機迅速損失了3000m的高度,如果是在低空後果將不堪想像。

垂直向下機動中的失速變態原因大多是飛行員急於退出俯衝粗猛拉桿造成的,圖為2004年雷鳥的墜機事故
“空間迷向”是一個近年來被廣泛關注的概念。以前,類似的事故發生時,往往將原因歸結為飛行錯覺,但是在良好天氣條件下目視飛行中出現錯覺令人費解。空間迷向“”是一個比較寬泛的概念,原因也多種多樣。與錯覺最大的不同是,“空間迷向”的原因不是信息不足。錯覺一般發生在夜間和複雜氣象條件下,由於飛機狀態的信息不足,飛行員容易受外部景物如:夜空、雲層、大海的影響,形成錯誤的狀態認知。而當信息充足的情況下,飛行員由於對於各種狀態信息的判斷出現混亂,有時甚至因為狀態信息過於復雜,飛行員的判斷無法做出決策,處於一種短暫的“無判斷”狀態,甚至失去判斷能力,這就是空間迷向的短時間現象。可能出現“空間迷向”的時機有很多,而在難度較高的“複合機動”中,由於動作銜接過於緊密、狀態變化過於復雜,飛行員很容易出現“空間迷向”。當飛行員對飛機狀態無法做出判斷時,他的操縱就是盲目的,出現墜機事故也就在所難免。
發生空間迷向時要緊盯儀表
通過研究超低空飛行事故,發現一個有趣的現象,各國在表演飛行中的事故,大都發生在向下的複合機動飛行中,尤其是大坡度或者帶滾轉的向下機動中事故發生概率更高,墜毀通常是由於軌跡控制失誤,高度損失過多造成的。
三、超低空之“惑”
面對超低空事故的嚴重後果,專家對事故的分析有真知灼見的並不多。超低空飛行遠比我們想像得要複雜得多,而導致超低空飛行事故的原因也不能簡單的歸結為疏忽大意或表現欲在作祟。烏克蘭表演空難發生後,對大會和飛行員的責難聲不絕於耳。事故調查人員最終將責任歸結為大會,一些軍事專家指出,飛行表演的高度不應低於400米,而且飛機不應從觀眾頭頂上飛過。飛行表演區與觀眾區的距離應該在300米至1500米之間。當然也有專家的分析比較客觀,他們認為此次事故最主要的原因是飛行員忽視飛機“下沉率”過大所導致,通過視頻回放可以看出,造成下沉率過大的直接誘因是在做“越肩滾轉”時飛行員下意識地拉桿,拉桿直接導致了飛機反俯角的迅速增加,甚至引起了運動軌蹟的偏轉,這也是這架飛機最終墜入觀眾區的重要原因。
對於飛行事故的疑惑如此之多,其實,真正令人疑惑的是超低空飛行本身。到目前為止還沒有系統研究超低空機動飛行的理論專著和權威性文獻,一些理論書籍中將超低空飛行技術列入特級飛行中,認為與一般特級飛行相比,超低空飛行只是高度不同。超低空機動飛行與一般的機動飛行有什麼不同,超低空飛行的操縱特性是什麼,飛行員在超低空飛行中的心理因素對飛行的作用如何?這些問題都值得我們深入的研究。
許多飛行愛好者問什麼是超低空飛行。也許你會說,超低空飛行的高度特別的低,然而,決定超低空飛行的並不是高度,而是飛行方式。但是如何區分飛行方式卻眾說紛紜。為此對各類飛行進行了專門的研究,認為從飛行員操縱飛機的感知方法和參照對象區分,可以將飛行大致分成五種基本模式:前庭感知飛行、數據跟踪飛行、狀態跟踪飛行、目標跟踪飛行和軌跡跟踪飛行。例如儀表飛行中飛行員通常保持飛行參數的穩定性,大致屬於數據跟踪飛行,特級飛行屬於狀態跟踪飛行,而空中加油和密集編隊飛行就屬於目標跟踪飛行,艦載著陸和精密進近著陸屬於軌跡跟踪飛行。不同的飛行模式,飛行的特點也是大為不同的。超低空飛行由於要跟踪地形的變化,因此屬於目標跟踪飛行的範疇。
目標跟踪飛行的概念是什麼呢?舉空中加油編隊飛行的例子大家就基本明白了。因為在像空中加油這樣的特殊飛行中,飛行員關注的不僅僅是飛機的狀態,而是本機與加油套管的關係位置。目標跟踪飛行與狀態跟踪飛行的最大區別在於,控制飛機的參照物不再是天地線或是地平儀的中心線,而是我們跟踪的目標。

在像空中加油這樣的特殊飛行中,飛行員關注的不僅僅是飛機的狀態,而是本機與加油套管的關係位置
關於目標跟踪飛行的特點,在人們研究近距空戰纏鬥時就發現了,飛行員發現在追擊中一味想地咬住目標總是欲速而不達,反倒是提前預判目標趨勢,穩定跟踪的方法能夠更好地鎖定目標。在空中加油飛行中,為了與加油套管對接,飛行員的目光緊盯套管,結果反而造成受油機不停地擺動,許多飛行員反映:空中加油飛行時加油機的軟管和錐套在空中“跳舞”,對接難度很大,就是由於高增益引起的。這種規律性的擺動專業上稱為“人機耦合振盪”,它是導致加油對接失敗的主要原因。

人機耦合振盪就是由於飛行員高增益控制輸入導致的
在超低空飛行中,由於高度特別的低,為了避免與大地相撞,飛行員必須不斷調整飛機的狀態,在這樣的飛行中,飛行員操縱控制的“增益”就特別的高。所謂操縱“增益”,指的是飛行員修正偏差時的駕駛杆位移與進入動作時操縱輸入的比值。例如飛行員做60度坡度盤旋,必須輸入壓桿行程,當坡度形成後,為了控制坡度飛行員必須不斷的修正,修正輸入的量值與初始輸入的量值比值較大的飛行就是高增益飛行。實踐表明,在目標跟踪飛行中,飛行的增益總是比較高的,因為任務的要求更高了,飛行員必須保持更高的操縱增益才能完成任務。也就是說超低空飛行和空中加油飛行是與常規的機動飛行完全不同的飛行狀態。了解了超低空飛行高增益的一特點,飛行中要注意掌握一些基本要領。

超低空飛行時撲面而來的大地對飛行員的視覺刺激強烈,這種刺激的作用負面的較多,容易引起飛行員不自主的緊張情緒
其一,目視前方。許多飛行員害怕超低空飛行時與地面接近導致危險,總是緊張地盯著翼下的大地,由於近距離目標的起伏變化,飛行員不自主地反複操縱,使得飛行操縱的增益進一步增加。反之如果我們目視前方,參照物的變化與運動相對穩定,操縱的增益就會減小,有利於更好地控制飛機狀態。就像空中加油飛行中,如果飛行員與加油錐套編隊,隊形就不容易穩定,而與遠處的加油吊艙或機翼編隊,隊形就穩定,加油對接成功率就較高。另外,目視前方對於低空飛行中的心理控制也比較有利。超低空飛行時撲面而來的大地對飛行員的視覺刺激強烈,這種刺激的作用負面的較多,容易引起飛行員不自主的緊張情緒,使得飛行員的操縱能力降低;而目視前方視覺刺激明顯降低,有利於飛行員心情平靜地專注飛行操縱。
其二,滾轉機動要穩桿。超低空飛行中飛行員最容易犯的錯誤就是滾轉機動時拉桿,查閱低空飛行事故的飛行參數據,我們總是能看到在滾轉機動中飛行過載超過2G的現象。其最主要原因是滾轉操縱時沒有穩桿。滾轉中拉桿一方面是由於飛行員對滾轉機動的操縱特點不了解。當飛機坡度在大於90度到小於270度的區間內,拉桿的結果是使飛機下墜,而適當地穩桿甚至頂桿則可以保持高度甚至使飛機上升高度。例如,在倒飛中頂桿形成1G的負過載就能保持飛機的平飛。滾轉中拉桿的另一個原因是心理因素,由於飛行員不注意目視前方,滾轉中當他看見地面撲面而來的時候,會本能地做出拉桿的動作,使過載急劇增加從而導致墜機事故的發生。
第三,柔和操縱。由於超低空飛行的高增益特點,當飛行員粗猛操縱時一旦出現偏差必然急於修正,使得飛機的狀態反複、急劇變化,嚴重的會導致誘發振盪。柔和操縱的注意力分配參照系很重要。一是要以遠為主,遠近結合。在模擬機上進行了大量的超低空試驗性研究,發現一味的目視前方,忽視了近處的高大障礙物也會導致墜機“事故”的發生,而過於集中註意近處,又會造成飛機狀態的急劇波動,高度反而不易控制。二是要以外為主,內外結合。既要根據遠處景物保持好飛機的狀態,也要根據平顯或儀表的高度、升降速度指示,控制好飛機狀態,尤其是要根據不同的高度控制好升降速度的變化。

在超低空飛行中,既要根據遠處景物保持好飛機的狀態,也要根據平顯或儀表的高度、升降速度指示,控制好飛機狀態
說到底,任何一種飛行狀態都是五種飛行模式的結合,只是以某種飛行模式為主,超低空飛行雖然是目標跟踪模式為主,但對於飛機狀態的整體把握始終是飛行操縱的重點,單打一的飛行習慣總是容易犯錯誤的。另外,由於低空飛行的這些特點,飛行員在飛行中註意力高度集中,容易疲勞導致能力下降,因此在飛行員感覺精力不足的情況下,應該停止超低空飛行。研究表面各種因素引起的飛行員能力下降,是導致飛行事故的最大元兇。
1982年5月4日,在英阿福島之戰中,阿根廷飛行員駕駛法國“超級軍旗”戰鬥機,正是利用超低空飛行的隱蔽性,達成了對英國軍艦突然襲擊的效果,一枚30萬美金的空對艦飛彈AM-39擊沉了價值幾億的英國謝菲爾德戰艦。

“超級軍旗”掠海突襲
如今,為了爭奪“一樹之高”的制空權,各國空軍都非常重視超低空飛行的訓練。海空巡邏中戰機從船舷之下掠過,定點打擊中戰機躲過了雷達鷹眼的搜索,靠的就是過硬的超低空飛行技能。超低空飛行因為其特殊性,掌握駕駛技能必須經過大量的超低空訓練,而且必須是地形跟踪訓練。在各國,一個飛行員要達到成熟駕馭超低空飛行的要求,至少要經過100小時以上的專業訓練,而且每年的超低空飛行時間一般不少於20小時,他們的研究表明,沒有20小時的最低超低空訓練時間,飛行員就難以保持超低空飛行技能,甚至找不到超低空飛行自由駕馭的感覺。而這種飛行的感覺,對於一個空中的王者而言就是飛行之魂。
除非我們準備放棄下一場戰爭,否則我們就必須用從難從嚴的超低空訓練,打造成超低空的王者!

